Een zelfontworpen controller voor high‑speed fotografie, bedoeld voor het nauwkeurig aansturen van ventielen, flitsers en camera’s. Het project richt zich met name op druppelfotografie, waarbij timing op microseconde‑niveau essentieel is.
Technieken: ESP32 · PCB‑ontwerp · C++ · Optocouplers · WiFi Doelgroep: Gevorderde hobbyisten en technische fotografen Status: Actieve ontwikkeling en uitbreiding
Inhoud
Projectdoel en achtergrond
Functionele eisen
Hardware‑ontwerp
PCB‑ontwikkeling
Software & besturing
Ontwikkelgeschiedenis
Resultaten en toepassingen
Toekomstige uitbreidingen
1. Projectdoel en achtergrond
High‑speed fotografie vereist uiterst nauwkeurige timing. Handmatige bediening of PC‑gebaseerde oplossingen bleken onpraktisch en foutgevoelig. Dit project heeft als doel een zelfstandig werkende controller te ontwikkelen die zonder externe computer kan functioneren en toch flexibel instelbaar blijft.
De eerste experimenten werden uitgevoerd met een Raspberry Pi, maar dit platform bleek minder geschikt voor realtime aansturing. Om die reden is het ontwerp later volledig herzien en gebaseerd op de ESP32 microcontroller.
2. Functionele eisen
De controller moest voldoen aan de volgende eisen:
Meerdere ventielen onafhankelijk aanstuurbaar
Galvanische scheiding tussen controller en externe apparatuur
Instelbare timing in milliseconden en microseconden
Lokale opslag van instellingen
Bediening zonder afhankelijkheid van één specifiek platform
Alle aansluitingen voor camera’s en flitsers zijn optisch gekoppeld. Hierdoor is er geen directe elektrische verbinding, wat zowel de controller als aangesloten apparatuur beschermt tegen schade. [nijholt.net]
3.3 Voeding
De voeding is geïntegreerd op het PCB en geschikt voor ventielen van circa 3 W per stuk. Hierdoor is geen externe adapter meer nodig en kan de controller direct op netspanning worden aangesloten.
4. PCB‑ontwikkeling
Tijdens de ontwikkeling zijn meerdere PCB‑versies ontworpen en getest.
Belangrijke ontwerpaanpassingen:
Correcte footprint voor de ESP32
Interne voeding i.p.v. externe adapter
Betere componentplaatsing vanwege beperkte ruimte
Galvanische scheiding op vrijwel alle IO‑poorten
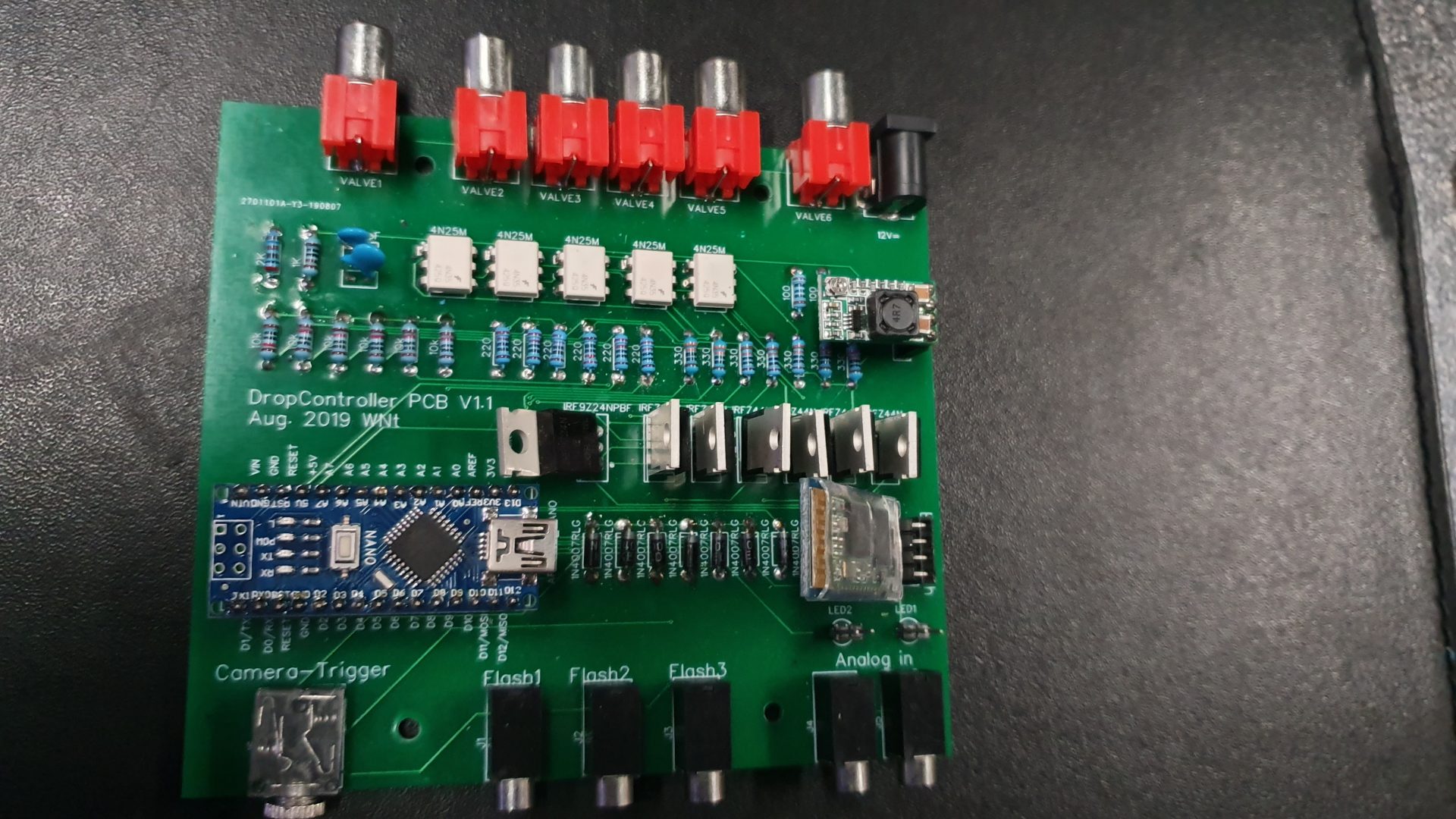
foto 1 - Circuit design hsController
Boven PCB ontwerp huidige versie,
5. Software & besturing
5.1 Ontwikkelomgeving
De oorspronkelijke software is ontwikkeld in C++ binnen de Arduino IDE. Later is overgestapt naar Visual Studio Code met PlatformIO, waardoor integratie met GitHub en code‑inspectie mogelijk werd. [nijholt.net]
Instellingen worden lokaal opgeslagen in het interne niet‑vluchtige geheugen van de ESP32, zodat ze behouden blijven na uitschakelen.
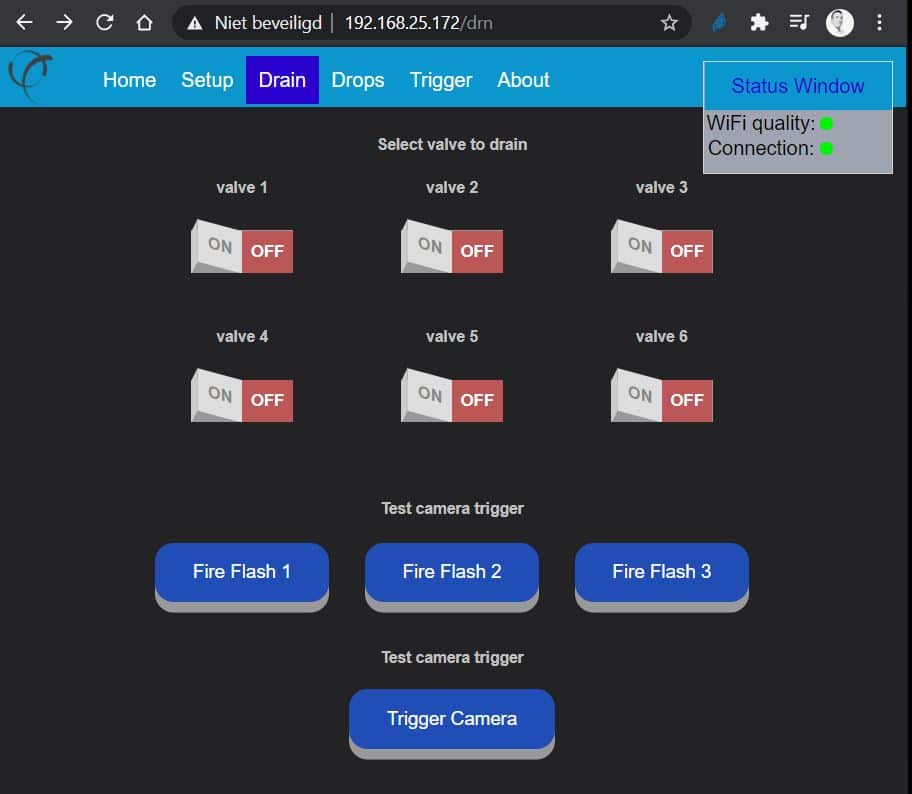
de Drain en Test pagina om de kleppen te legen en de verbindingen met camera en flitser(s) te testen.
Boven de Drain en Test pagina om de kleppen te legen en de verbindingen met camera en flitser(s) te testen.
6. Ontwikkelgeschiedenis
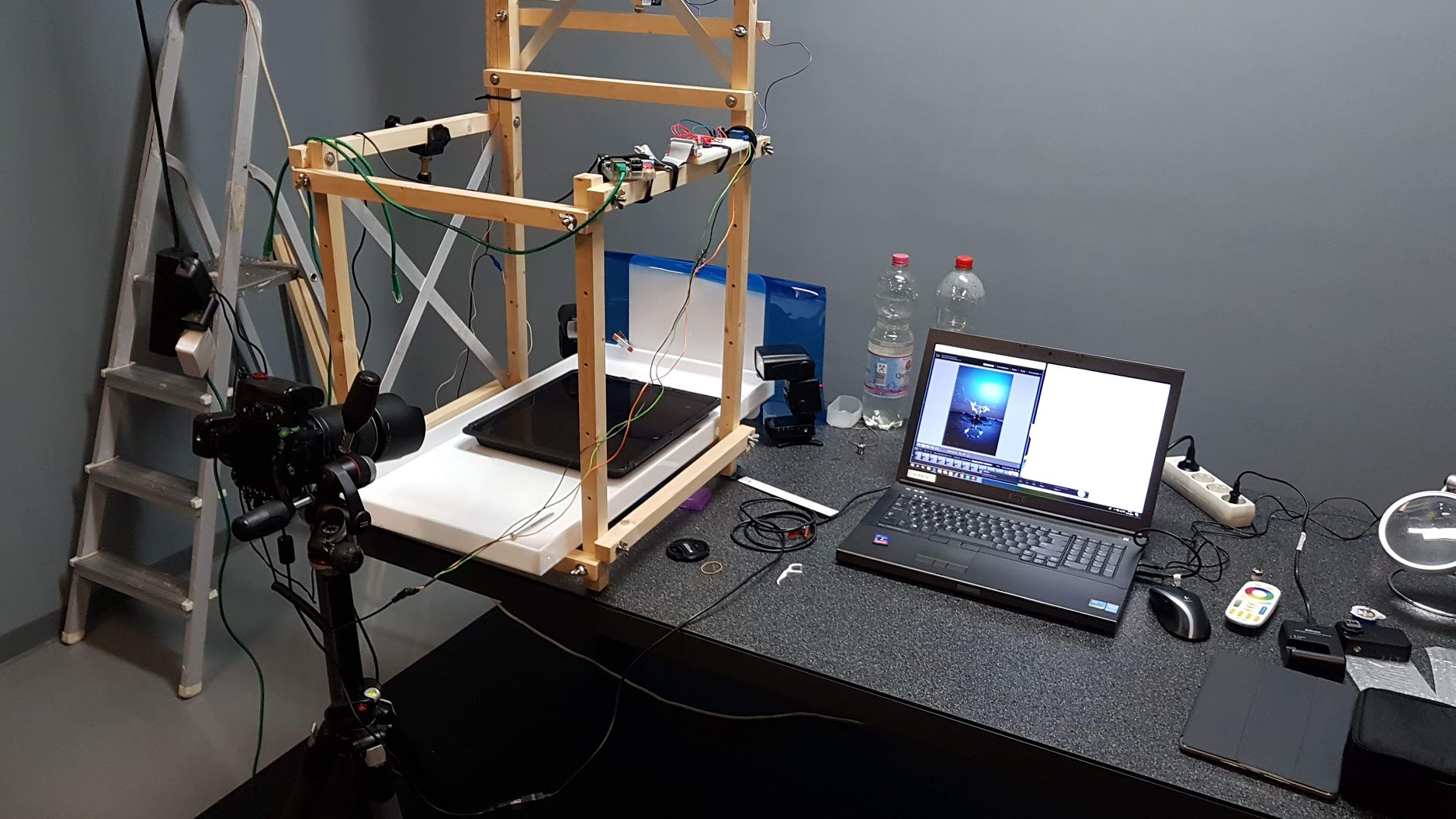
Fase 1 – Raspberry Pi (2017)
Eerste opstellingen met Python‑scripts en open hardwareconfiguraties. Instellingen werden aangepast via tekstbestanden en vereisten een aangesloten laptop.
Gemaakt met de Raspberri Pi in 2017
foto links, houten opstelling met RPi, foto’s via Lightroom direct zichtbaar op het scherm (thetering)
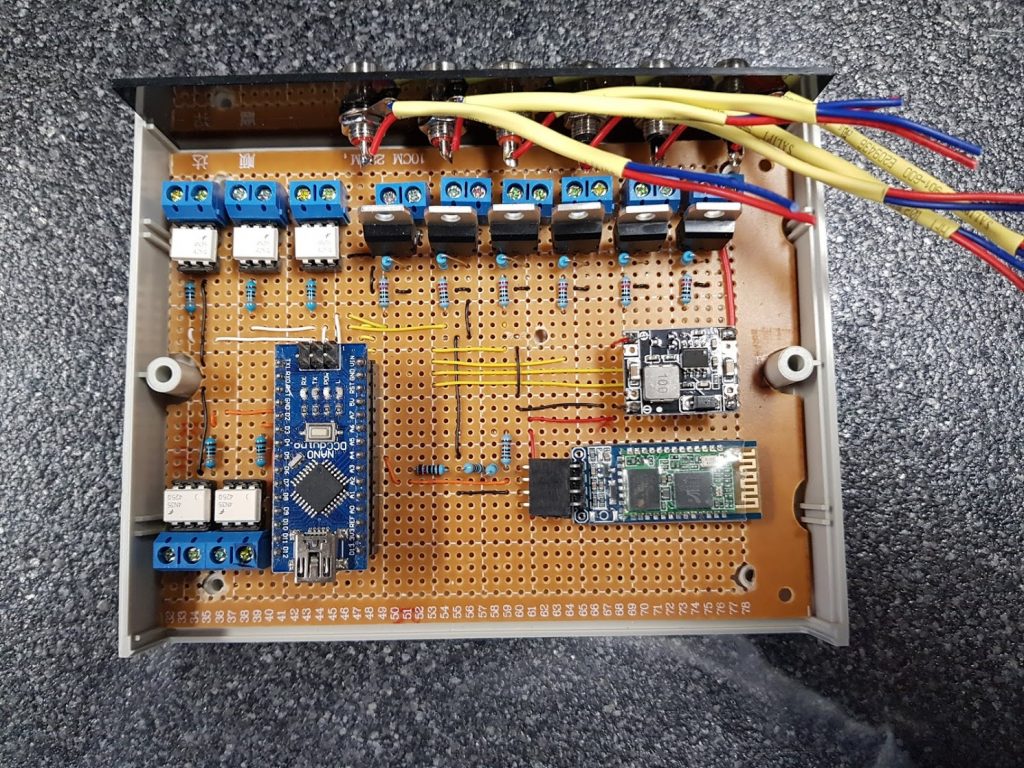
Fase 2 – Arduino Dropcontroller
Gebaseerd op een open‑source ontwerp, aangepast voor eigen gebruik en ingebouwd in een compacte behuizing.
Eerste experimteer print versie van de Dropcontroller
Eerste inbouwbare versie van de Dropcontroller
Fase 3 – ESP32‑migratie
Volledige conversie naar ESP32 om WiFi‑besturing, betere realtime prestaties en platformonafhankelijkheid mogelijk te maken.
3D schermafdruk van het PCB ontwerp
7. Resultaten en toepassingen
Met deze controller zijn onder andere gerealiseerd:
Druppelfotografie met paraplu‑effecten
Waterstralen aangestuurd met luchtdruk
Experimentele opstellingen met meerdere ventielen
Uitbreidingen richting web‑gebaseerde bedienin
8. Toekomstige uitbreidingen
Geplande uitbreidingen zijn:
Volledig web‑gebaseerde configuratie
Opslaan en laden van presets
Verdere optimalisatie van PCB en behuizing
Mogelijke nieuwe toepassingen buiten fotografie
HIGHSPEEDFOTOGRAFIE
Vind ik leuk:
Vind-ik-leukAan het laden...
Winkelmandje
Deze site maakt gebruik van cookies om uw ervaring te verbeteren.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.




Je moet ingelogd zijn om een reactie te plaatsen.